在辛辛苦苦装好一架穿越机准备起飞时,心情难免有些忐忑:这套PID参数能飞起来吗?稳吗?会不会抖?根据我的经验,用Mini Pix的默认参数飞穿越机,很可能会抖。原因是现在的穿越机为了更极致的飞行,往往选择推力较大的动力系统,更暴力的电机、桨叶和电池。所以,用默认参数起飞很可能出现高频抖动,或是稍微推一点油门却突然蹿高、上下抽等现象。
如果遇到了问题,本文提供一些思路及建议参数,帮助你解决问题。或者觉得手感不好,动作迟缓转向慢,希望改善动态响应的,本文也能提供一些帮助。
1.基础篇
1.1 PID手动调参步骤
首先说一下我的配置:
机架:210
电机:银燕 RS2205 2300KV
电调:BLHELIS 30A 刹车开启
电池:4S 1500mAH
飞控:乐迪Mini Pix
整机重量:602克(含电池、GPS、摄像头、图传等)
Stabilize自稳模式,机架类型X型,完成所有必要校准。
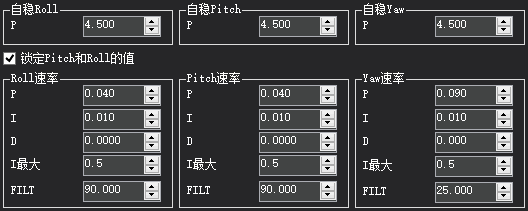
初始PID参数如下:
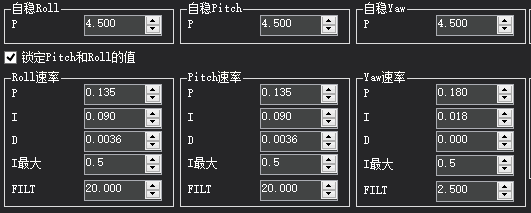
按照这套参数,我解锁轻推油,先是4个电机以同样的速度转动,油门超过阈值之后,控制信号开始参与。机子出现剧烈抖动,还蹿高。
这种情况是由于P和D都过大,需要做大幅调整。
在调参时,建议在全部参数表里直接修改,因为扩展调参里设定的范围和步进未必能满足。步骤如下:在全部参数表右侧搜索ATC


找到对应的参数,在右侧即可修改对应的值。
1.2 寻找P
首要任务是找到合适的P,此时可以把I设最低,D归零。
鉴于出现的情况,可以先把P大幅降低:Roll、Pitch降到1/4左右,Yaw降到1/2。
试飞,能起飞了,不会发疯,但是水平方向上(roll、pitch)有点荡。打杆响应正常,基本可控。yaw没有明显感觉,暂时不动。
改变P,每次增加0.01(0.03能飞,不妨试试改变它的1/3),观察机子反应,直至出现振荡,且越来越厉害,不收敛。
再减小P,每次减小0.005,直至轻微地振荡,但是是收敛的。
1.3 寻找D
P大概确定后,就可以加入D,能改善轻微的晃动,更稳定。
从0.0000开始增加,先粗调,每次增加0.0005。
对于210轴距的穿越机来说,当D加到0.0015以上时,有可能会出现高频震颤,能听到一些吱吱声,这时就需要降低D的值了。
找到一个合适的D,飞起来会感觉比较稳,而且声音好听,能听到嘤嘤的调节转速的声音,而不是嘈杂的吱吱声。
1.4 寻找I
相对P和D来说,I的调节没有那么的明显。I能提高稳态精度,也可以在快速打摇杆时,改善机子的响应,影响跟手和锁定的感觉。

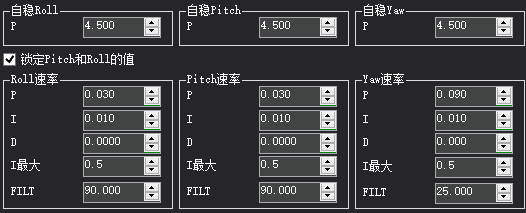
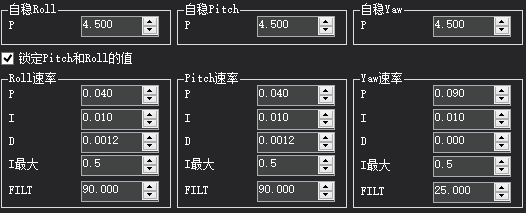
1.5 穿越机PID建议参数
对于210轴距或者差不多大小的穿越机,我觉得这套参数是可以让大多数人平稳离地的,模友可以根据自己的情况进行调整。
2. 定高
Mini Pix内置气压计,由于气流会干扰气压高度,乐迪Mini Pix在壳子内部气压计位置使用胶圈和海绵做保护,尽量减小气流影响。
用Mini Pix装穿越机用定高飞,可以使高度控制更容易,FPV时可以把更多的注意力放在路径选择和避开障碍上。
用定高飞FPV,对于新手而言,很大程度上降低了入门门坎。对于老手来说,也能放松放松,找到不一样的乐趣。
类似的,和角速度控制一样,高度控制也有PID,需要稍做调试。
如果油门加速度的P偏大,会导致垂直上下抽动。
如果油门加速度的P偏小,会有点定不住。
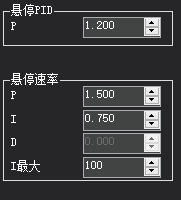
下面参数可供参考。

3. 定点
定点必须要安装GPS,搜星数和精度达到要求才能切到定点。
定点效果也受悬停PID影响,如果P不够,可能出现定不住。如果P太大,可能导致有点摇晃。下面参数可供参考。
4. 改善转向
4.1 航向转的太慢了
如果觉得航向慢,可以在全部参数表里找到下面几个值进行修改。

ACRO_YAW_P 它决定了你需要的快慢,提高到10应该够用了,如果你需要更快,可以超出范围改到15甚至更高。

ACRO_Y_EXPO 它调节曲线,值为正,摇杆量越大,加速越明显。值为负,摇杆量越大,加速不那么明显。我取0.5。

ATC_ACCEL_Y_MAX 它限制了角速度最大变化率,如果希望转的快些,可以把这个限制设大一些。
4.2 最大倾斜角

ANGLE_MAX 是所有飞行模式的最大倾斜角,5000代表50度,
角度越大,可以飞的越快,同时意味着越难操控,量力而为。
5. 手动模式
玩穿越,怎么少的了手动模式?
将飞行模式设置为ACRO即为手动模式。预设的手动并非纯手动,需要另行设置。如下:

ACRO_TRAINER 设为0,纯手动。只有陀螺仪参与控制。设为1,半手动。能随意翻,也能够自动回平。设为2,带限角的半手动。
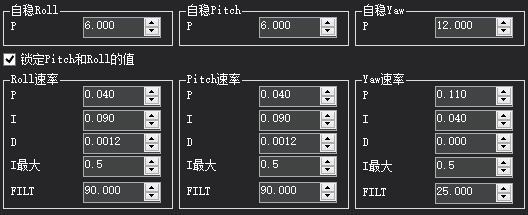
如果觉得旋转的速度太慢,可以修改:

ACRO_RP_P 决定了你需要的角速度。

ACRO_RP_EXPO 它调节曲线,值为正,摇杆量越大,加速越明显。值为负,摇杆量越大,加速不那么明显。我取0.5。

ATC_ACCEL_R_MAX , ATC_ACCEL_P_MAX它们限制了角速度最大变化率,如果希望转的快些,可以把这个限制设大一些。


 Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程
Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程