4.1 调参软件下载及连接
(1)接线:一根安卓数据线,轻松实现参数更改与设置;
支持USB在线升级,随需要不断增加新功能,让您的T8S永葆领先。
便捷的USB 数据备份拷贝功能,轻松实现大批量模型数据的复制,只需一次调参,便可批量复制!
(2)安卓手机数据线一端连接电脑USB接口,另一端连接遥控器显示屏下方的USB接口;
(3)打开电脑调参软件,点击运行T8S调参软件。
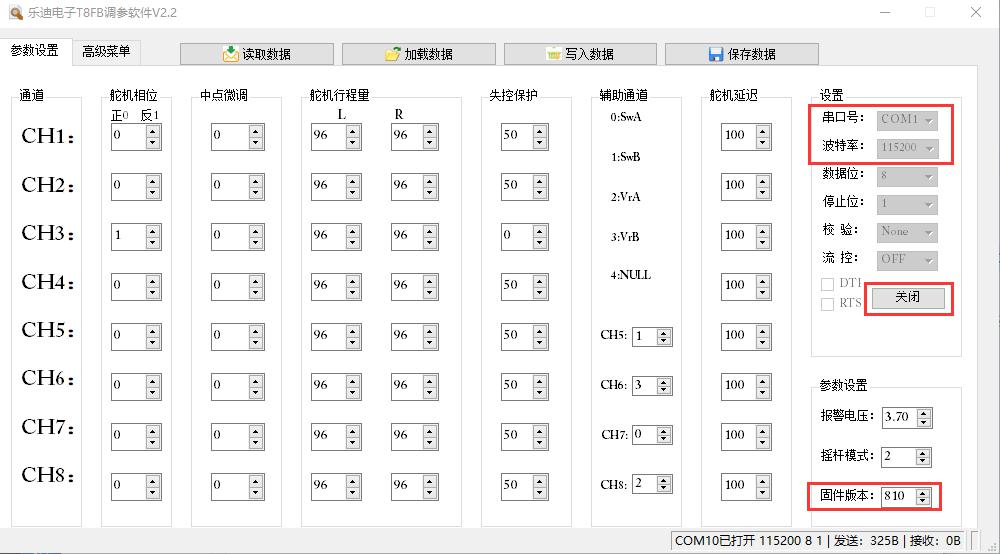
选择串口号
用USB线将接遥控器T8S连接至电脑后,打开T8S,调参软件会自动识别串口,确保波特率为115200,点击“打开”。
点击读取数据之后,调参界面出现固件版本号才表示连接成功,如果固件版本号显示为0则代表未打开成功,需要点击关闭后重新连接调参APP。
4.2 参数设置
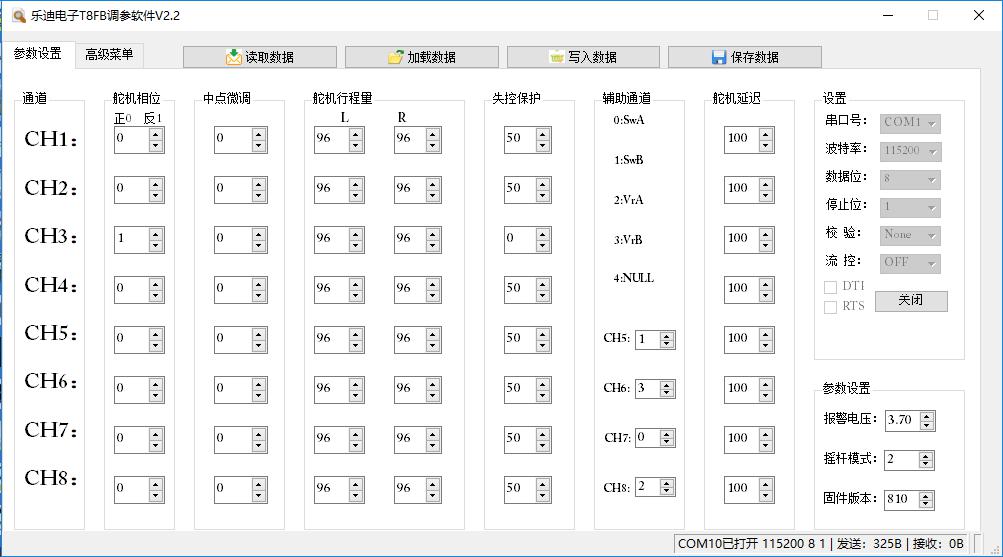
4.2.1参数设置界面说明
读取数据:点击“读取数据”按钮之后会将遥控器中的数据读取并显示在电脑调参界面上;(读取时后面两个绿灯会同时快闪,并伴有滴滴两声的提示音)
写入数据:点击“写入数据”按钮之后,将设置好的数据保存至T8S;(写入时绿灯会快闪一次,并听到滴的一声)
当然在“读取数据”后,如果需要调整原有设置的数据,可以根据需要自行在调参软件上进行数据修改,修改数据完成后记得再次点击写入数据。
保存数据:可以将读取的数据或者设置好的数据保存成TXT文件储存在电脑上,后续需要调用这个保存的数据可以点击“加载数据”从电脑中导入该数据至T8S;
加载数据:点击“加载数据”按钮之后,可以将保存好的TXT文件加载到电脑软件中,可以通过在方框内直接输入文件名的方式,或者点击“浏览”来从电脑文件中调用之前保存的数据,载入成功之后,请点击“写入数据”;
4.2.2 舵机相位
此选项用来改变舵机响应遥控器控制输入(控制杆或开关)的方向。有“正相”和“反相”两个选项。
T8S出厂默认CH3油门通道为反相,其他通道均为正相。
设置“反相”功能后,应检查模型上的所有控制以确定是否在正确的方向运动,确定没有反向某个舵机,除非是自身需要设定舵机反向。
比如T8S的一通道副翼通道,在连接固定翼的时候,如果向左打副翼摇杆,而映射到固定翼的副翼舵面上左边舵面是向下压,则表示遥控器副翼相位和固定翼副翼舵机反相,此时,需要将副翼的相位设置为反相。
注意:在每次飞行前都要检查发射机控制舵机的反应,单独改变某个舵机响应操纵杆移动的方向。
如果使用的固定翼机/滑翔机的模型中有混控功能控制多个舵机(混控功能的方式),譬如襟副翼混控或V型尾翼,必须事先将各个功能设定好,否则很容易混淆哪个舵机需要反转或者哪个功能需要反转。
在每次飞行前请务必检查舵机方向,这与检查模型存储、连接和遥控器各项功能是否正确一样,需要格外注意。
4.2.3 中点微调
指各通道在回中位置上的舵量值,可以对舵机的中立位置进行精细的调整。
中点的出厂默认值为“0”,即没有设置中立微调,调整范围为-100至+100,您可以根据实际需要进行中立点的微调。因为更改了中立微调的通道对应的舵机行程范围将会被限制在单一的方向,所以在开始设置中立微调之前,建议操作程序如下:
① 测量并记录预期舵面的位置。
② 将中立微调设为0。
③ 将舵机臂和连杆连接起来,使舵面的中立位置尽可能的准确。
④ 在中立微调中选用较小的调整量调至精准位置,最好是每次选用加1的方式来调整,使其设定在一个最精确的舵量值处。
4.2.4 舵机行程量
此选项用来调整舵机两个方向的行程,以实现最灵活的行程调整。舵机行程量可分别单独调整一个舵机某个方向的行程,而不会同时影响该舵机的两个方向。舵机行程量的出厂默认值是“96”,可根据实际需要来调整,可调范围在0到120之间。
4.2.5 失控保护
失控即为指失控保护参数值设置栏,当遥控器关机或信号丢失时,接收机上各通道舵机所处的位置。失控保护值需要提前预设,且每个通道都可以独立设置。设置此选项有两个注意事项:
① 油门的失控选项对遥控器电池也同样适用。失控保护数值为0时表示当失去信号或者遥控器没电时,油门将降至最低点,失控保护数值设置为50时,则表示当失去信号或者遥控器没电时,油门量将处于最大油门量和最小油门量的中间,其他通道舵量同理。
② 失控保护设置用于在某些比赛中,在坠毁或有可能损伤之前安全着陆。相反的,也可用于使所有舵机中立,使飞机的飞行时间达到最大。
4.2.6 辅助通道
五通辅助至八通辅助,均可根据您的实际需要来设置控制这4个辅助通道所对应的辅助开关。
可以用来做一些辅助功能,如打开或关闭投物舱,打开或关闭释放烟雾的控制机器等。定义5-8通道发射机控制和接收机输出之间的关系。
如果不需要使用这个辅助通道,则可以选择设置“4”,也就是NULL,无开关控制。
4.2.7 舵机延迟
此选项用来调整通道舵量与实际操作之间的同步比率。出厂默认值为“100”,即没有延迟。您可以根据实际需要来更改每个通道所对应的数字以实现打摇杆和实际的舵机反应之间的延迟。
4.2.8 报警电压
电脑调参APP中,T8S的报警值默认为3.7V,您也可以自行设置低压报警值。当您的控电电压低于所设置的电压值时,遥控器会自动发出“滴”“滴”声提示您。
4.2.9 摇杆模式
一般默认1为右手油门,2为左手油门,3为玩具手的右手油门,4为玩具手的左手油门。在您打开遥控器外壳更换了遥控器的左右手之后,请记得在APP中将对应的摇杆模式也进行更换。
4.2.10 固件版本
可通过刷固件来改变此选项所对应的数字。详细的固件升级方法请参考说明书第二章 固件升级部分。
4.3 高级菜单
此界面共有六个设置选项,分别为“大小舵设置”,“姿态选择”,“升降副翼混控”,“V型尾翼混控”,“可编程混控一”,“可编程混控二”。参考下图:

4.3.1 大小舵设置
可以通过使用辅助开关来控制所对应通道舵量的最大值与最小值。
使用前要先把“混控”的状态从“禁止”设置为“打开”。
在不更改参数,也就是保持T8S出厂默认参数时,当把SWA(CH7)开关推到最上方时,拨动1通道摇杆,一通的上下最大舵量可分别达到+100和-100。
此时如果把“比例-UP”改为50,意味着一通道上下最大舵量只能分别达到+50和-50。“比例-DOWN”代表了辅助开关推到最下方时所对应通道舵量的最大值与最小值。
4.3.2 姿态选择
使用前要先把禁止改为需要选择的通道。从CH5至CH8可选,一般在连接PIX,MINIPIX,APM,TURBO PiX飞控时,选用CH5为姿态模式通道,DJI飞控时,选用CH7为姿态模式通道。其他飞控请参考飞控使用说明书选择正确的姿态模式通道。
姿态1至姿态6后面所对应的数字代表了不同的控制比例从而输出不同的控制信号。T8S出厂默认的姿态数值对应的是PIXHAWK,MINIPIX,TURBO PiX和APM的值,也就是在使用上述4款飞控时,您只需要在地面站上选择飞行模式即可,不用在调具体的参数。其他飞控您可以根据实际需要来更改这些数字。
4.3.3 升降副翼混控
使用前要先把“通道”的状态从“禁止”设置为“打开”。此选项可调性能如下:
① 要求采用第 1 和第 2 通道。
② 独自调整副翼左或者副翼右的行程以实现副翼差动。
③ 考虑到上下行程的差异要单独调整升降舵1和升降舵2的行程。
4.3.4 V型尾翼混控
此混控用在V型尾翼固定翼飞机上,那样升降舵和方向舵功能能联合起来用于双尾舵面。升降舵和方向舵的行程在每个舵面都可以单独调整。此选项可调性能如下:
① 要求使用第2和第4通道。
② 考虑到舵机行程的差异,每个舵面都可以独立调整行程。
③ 不能使用方向舵差动,如果想要设置方向舵差动,请将尾舵1和尾舵2设置为0,然后进入“系统设置”功能菜单界面,使用两个可编程混控,方向舵-升降舵混控和方向舵-方向舵混控,为上下行程设置不同的百分比,那就是新的方向舵行程。
注意1:如果您使用V型尾翼功能,则不能同时使用升降副翼混控功能。
注意2:当检查舵机运动时,请务必有规律地移动升降舵和方向舵。如果已经指定了大行程量,那么当操纵杆同时移动时控制就会相互干扰或者超行程。此时,请减小行程直到没有干扰发生。
4.3.5 可编程混控
此功能可补偿飞机的姿态变化(例如在响应方向舵输入时出现横滚趋势)。
用两个或者多个舵机控制飞机的某一个转动轴(例如两个方向舵)。
自动更正特殊的运动(例如当襟翼降低的同时降低升降舵)。
运转第二个通道来响应第一个通道的运动(例如增加烟油量来响应大油门的使用,只限于发烟开关处于激活状态)。
在一定条件下关闭主要控制的响应 [例如:双发(动机)飞机模拟关闭其中一个发动机飞行或者加减一侧发动机油门协助方向舵转弯]。
① 可编程混控一
默认设置用于协助转弯的副翼方向舵混控,也可以跟进需要自行设置。
② 可编程混控二
默认用于飞行小直径筋斗动作的升降舵襟翼混控,也可以跟进需要自行设置。
可编程混控的可调性能:可以用于混控的通道,所有这两种混控都可以使用1-8通道的任意组合。
主控:控制通道。设置的主控通道就是被控通道要跟随其运动的通道。1至8通道均可以设置为主控通道。
被控:被控通道,即设置之后将由主控通道来控制(举例来说:方向舵-副翼混控,主控通道为方向舵,被控通道为副翼舵,“偏置”设置为0,“UP”设置为25%,则表示打方向舵向左的时候同时更正横滚补偿)。


 Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程
Radiolink F110S 定高版 mini 竞速室内穿越机飞行视频教程