

































































 简体中文
简体中文 English
English
搜索结果建议
快速链接
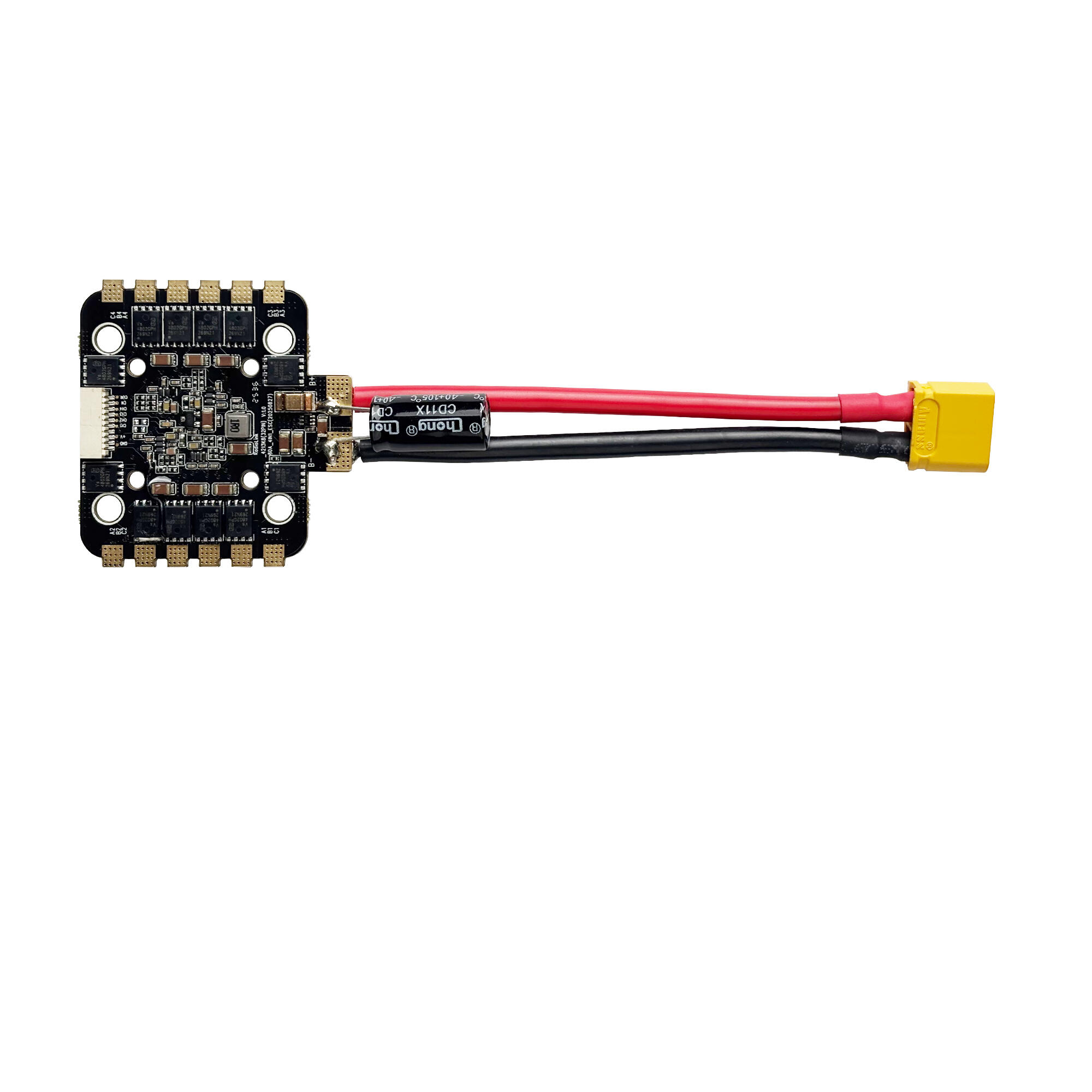
Dimension: | 20*22*19mm(0.79"*0.87"0.75") |
Weight(With wires): | 8g(0.28oz) |
Input Voltage: | 4.5~5.5V(High Voltage NOT supported) |
Current: | 18mA@5V |
Power: | 90mW |
Operating Temperature: | -30~85℃ |
Detected Distance: | 40cm~450cm(15.75"~177.17") |
Detecting Precision: | 0.4cm (0.16") |
Detecting Frequency: | 40±1.0KHz |
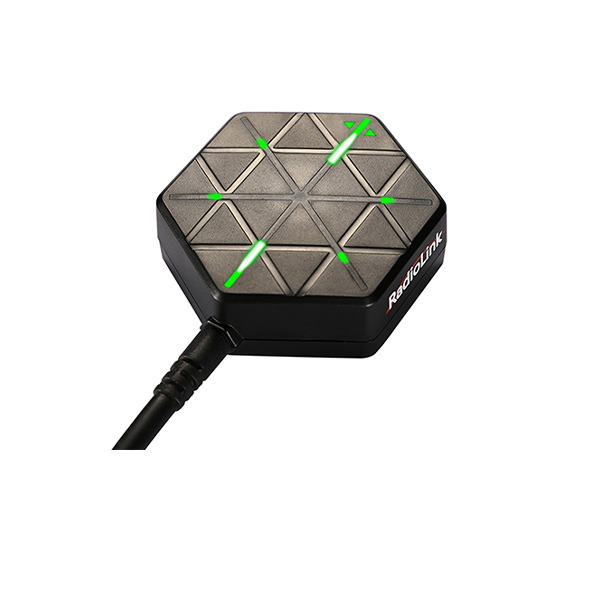
Beam angle: | 60° (transceiver) |
Fade Area: | 40cm(15.75", read as 0 fade area by FC) |
Output: | I2C, UART(MAVlink protocol) |
Work Cycle: | 30ms |
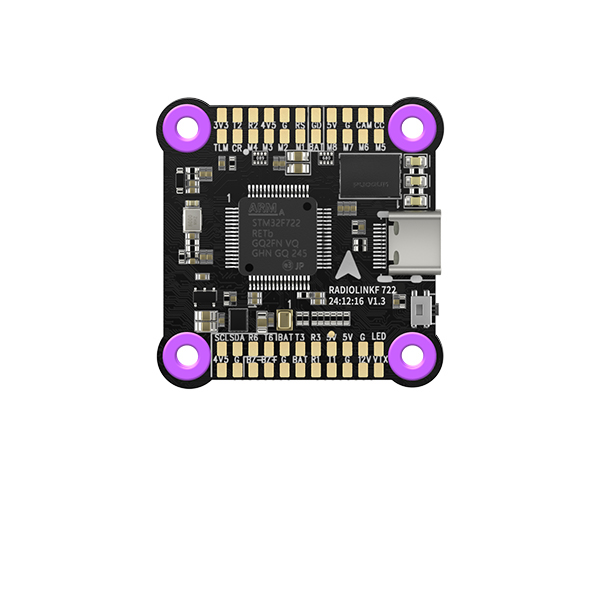
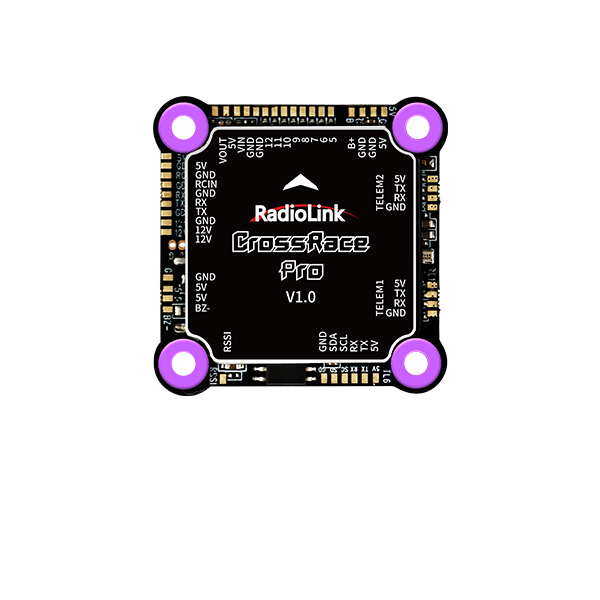
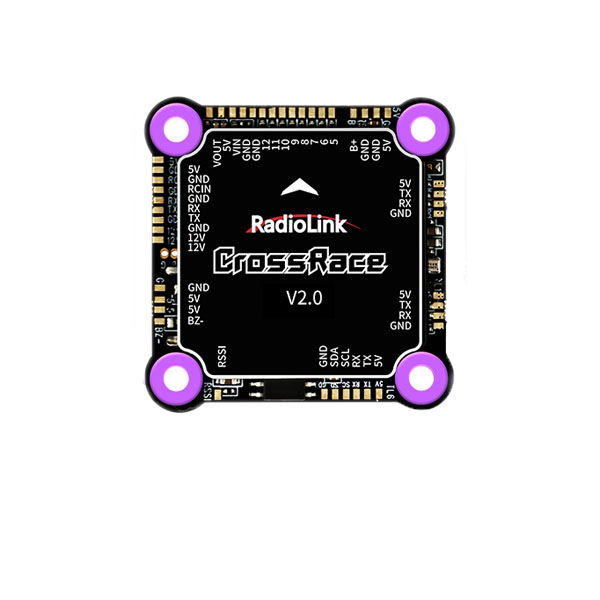
Flight Controller Compatibility: | PIX6, PIXHAWK, CrossFlight, CrossFlight-CE, CrossRace Pro, CrossRace, Mini Pix, TURBO PiX, and PIXHAWK of open-source |
Model Compatibility: | Helicopters, Multirotors, Airplanes, Cars, and Boats |
Obstacle Avoidance Directions: | Maximum 2 directions: It can realize obstacle avoidance in any two directions forward, backward, left, right, and upward at the same time. Or, realize obstacle avoidance in any one direction of forward, backward, left, right, and upward and altitude-hold to the downward at the same time. |
Specifications





 简体中文
简体中文- English